
Journal of Geographical Sciences >
Method for UAV-based 3D topography reconstruction of tidal creeks
|
Zhang Xuhui (1996-), Master Candidate, specialized in tidal flats and remote sensing, E-mail: zhangxuhui_hhu@163.com |
Received date: 2021-03-05
Accepted date: 2021-08-17
Online published: 2022-02-25
Supported by
China National Funds for Distinguished Young Scientists(51925905)
National Natural Science Foundation of China(41401371)
Copyright
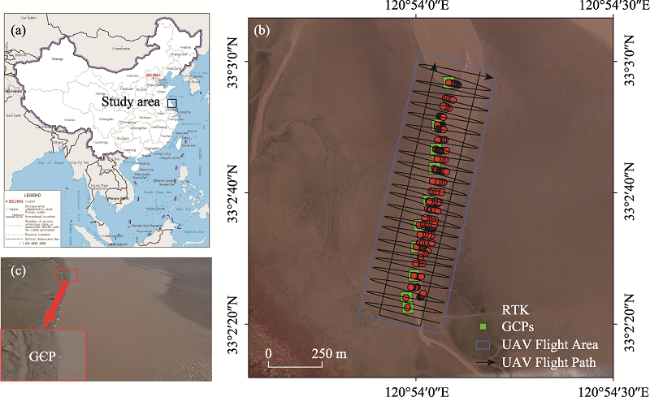
It is common to obtain the topography of tidal flats by the Unmanned Aerial Vehicle (UAV) photogrammetry, but this method is not applicable in tidal creeks. The residual water will lead to inaccurate depth inversion results, and the topography of tidal creeks mainly depends on manual survey. The present study took the tidal creek of Chuandong port in Jiangsu Province, China, as the research area and used UAV oblique photogrammetry to reconstruct the topography of the exposed part above the water after the ebb tide. It also proposed a Trend Prediction Fitting (TPF) method for the topography of the unexposed part below the water to obtain a complete 3D topography. The topography above the water measured by UAV has the vertical precision of 12 cm. When the TPF method is used, the cross-section should be perpendicular the central axis of the tidal creek. A polynomial function can be adapted to most shape of sections, while a Fourier function obtains better results in asymmetrical sections. Compared with the two-order function, the three-order function lends itself to more complex sections. Generally, the TPF method is more suitable for small, straight tidal creeks with clear texture and no vegetation cover.
ZHANG Xuhui , LI Huan , GONG Zheng , ZHOU Zeng , DAI Weiqi , WANG Lizhu , Samuel DARAMOLA . Method for UAV-based 3D topography reconstruction of tidal creeks[J]. Journal of Geographical Sciences, 2021 , 31(12) : 1852 -1872 . DOI: 10.1007/s11442-021-1926-9
Figure 1 (a) Map of China; (b) Study area adjacent to Chuandong port, Jiangsu; (c) Part of the tidal creek shot by UAV |
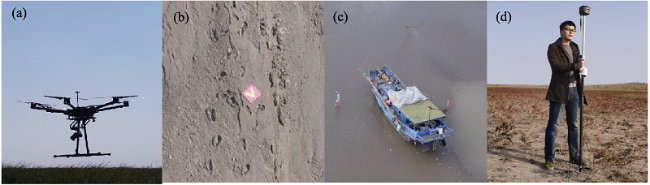
Figure 2 (a) DJI M600 UAV and Zenmuse X5 camera; (b) GCPs; (c) Observation vessel; (d) RTK-GPS |
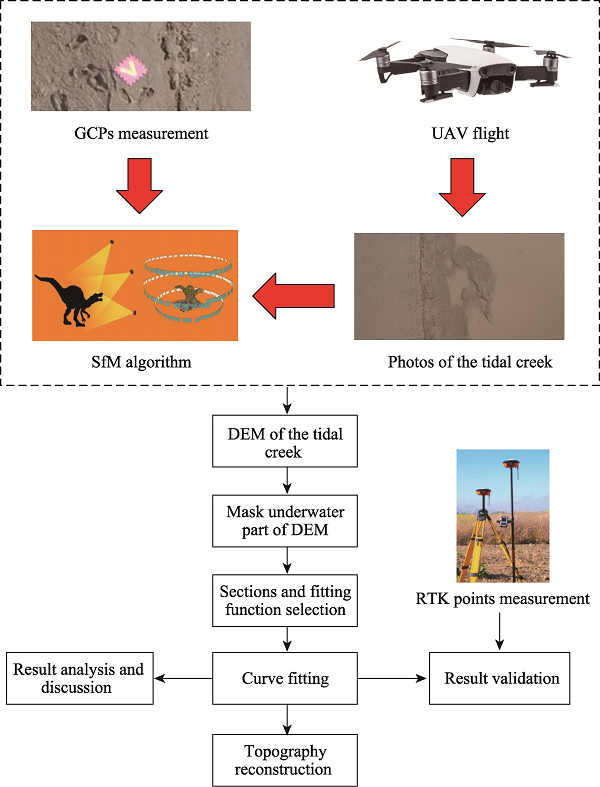
Figure 3 Concept of the TPF method |
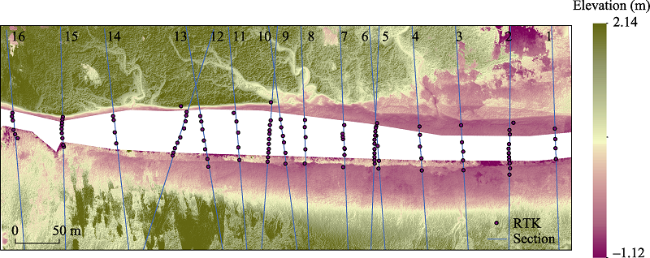
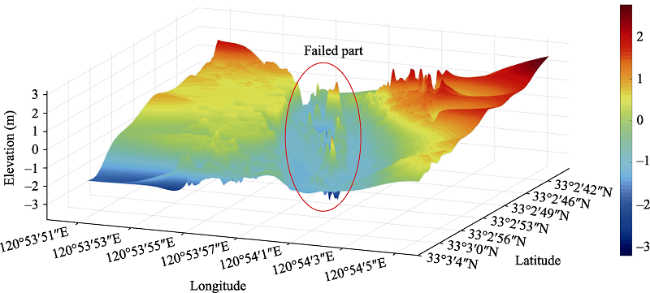
Figure 4 DEM of the tidal creek |
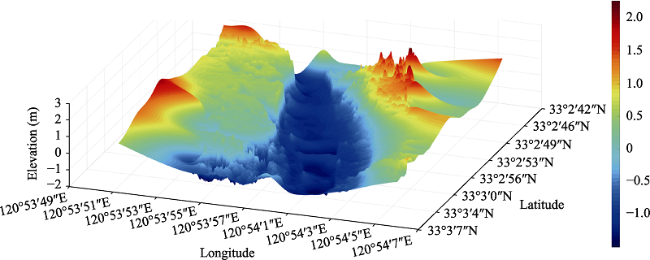
Figure 5 Surface map of the DEM of the tidal creek |
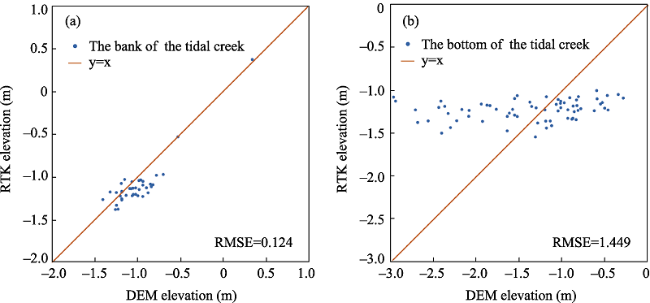
Figure 6 Elevation accuracy at the bank of the tidal creek (a); and Elevation accuracy at the bottom of the tidal creek (b) |
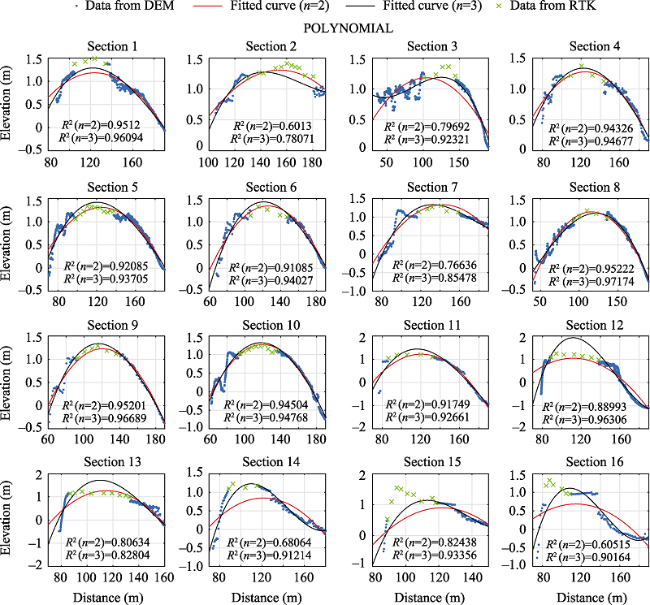
Figure 7 Bottom predictions with polynomial function |
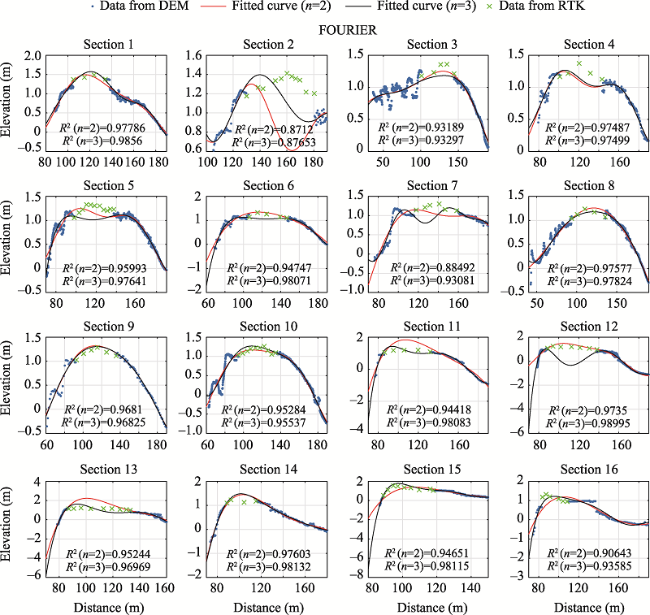
Figure 8 Bottom predictions with Fourier function |
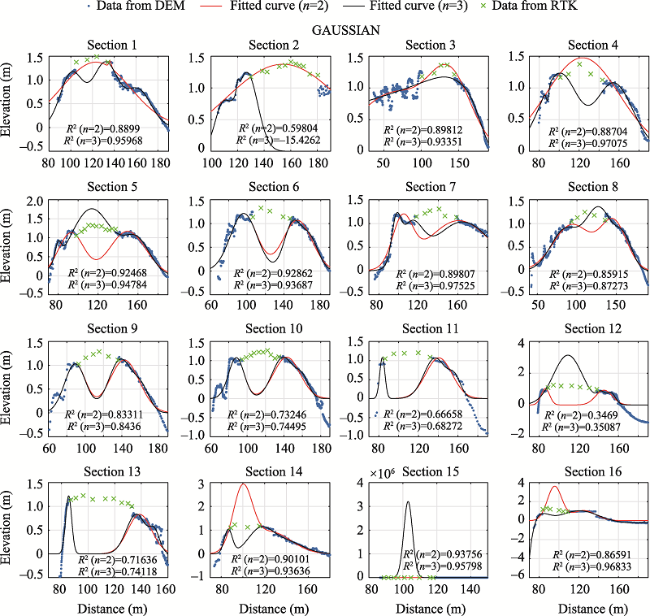
Figure 9 Bottom predictions with Gaussian function |
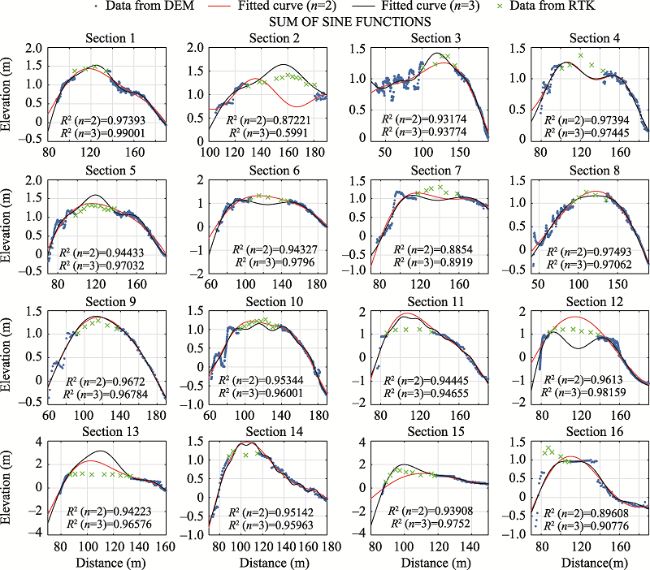
Figure 10 Bottom predictions with sum of sine functions |
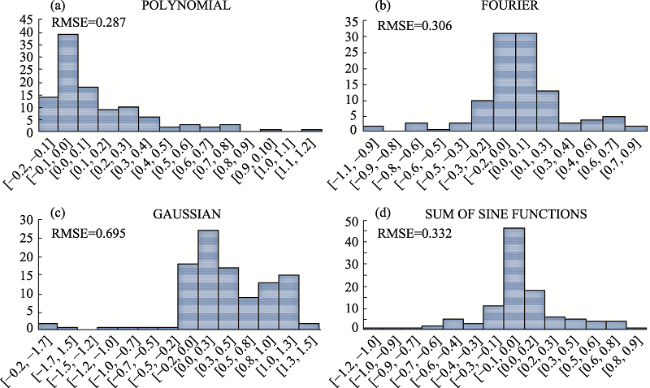
Figure 11 Error distribution with different fit functions (n=2) |
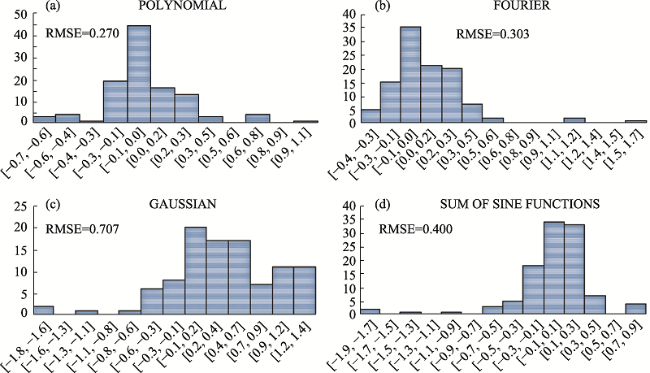
Figure 12 Error distribution with different fit functions (n=3) |
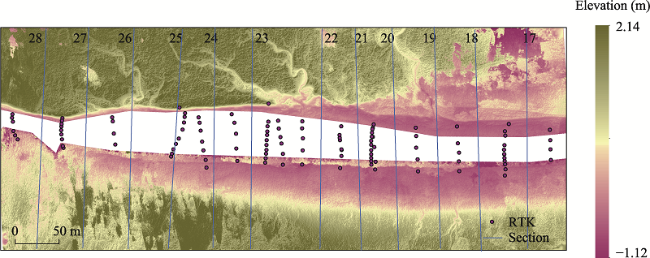
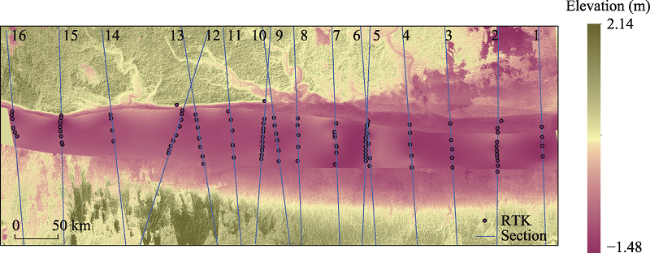
Figure 13 The position of additional 12 sections |
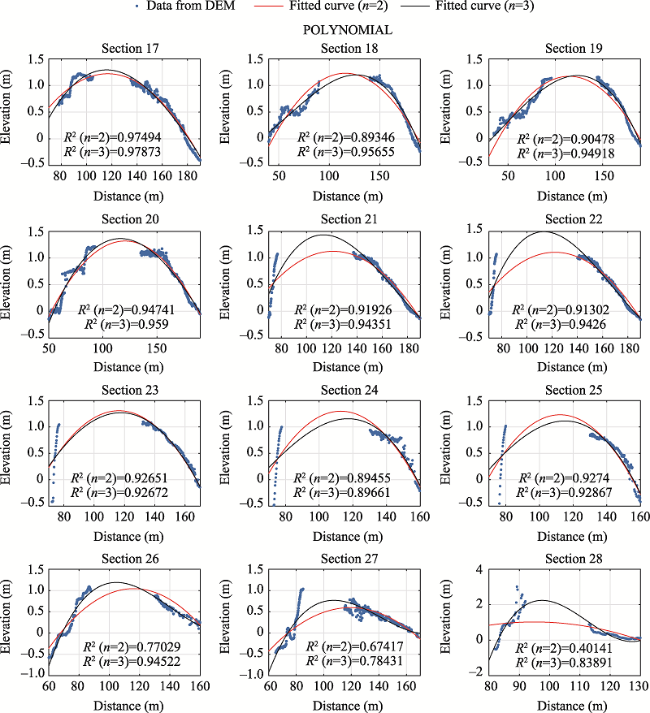
Figure 14 TPF method with polynomial function |
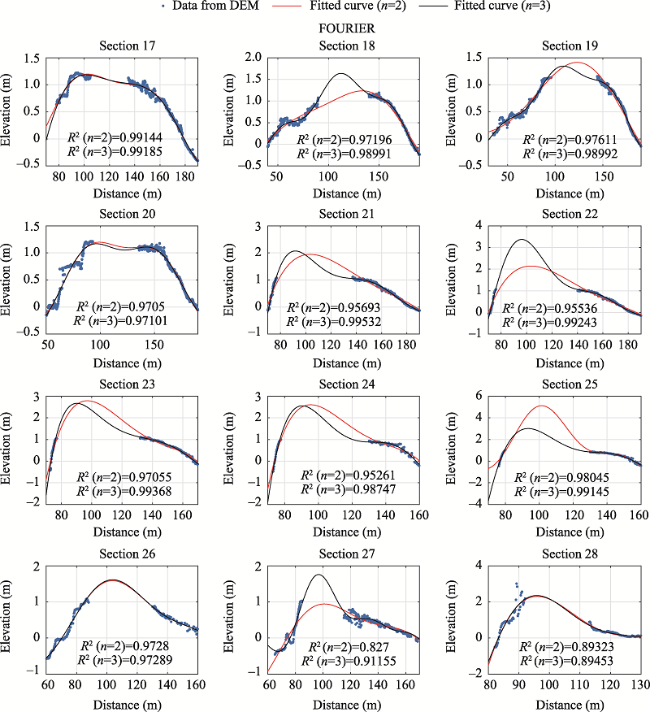
Figure 15 TPF method with Fourier function |
Figure 16 DEM of tidal creek corrected by TPF method |
Figure 17 Surface map of tidal creek corrected by TPF method |
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
|
| [30] |
|
| [31] |
|
| [32] |
|
| [33] |
|
| [34] |
|
| [35] |
|
| [36] |
|
| [37] |
|
| [38] |
|
| [39] |
|
| [40] |
|
| [41] |
|
| [42] |
|
| [43] |
|
| [44] |
|
| [45] |
|
| [46] |
|
| [47] |
|
| [48] |
|
| [49] |
|
| [50] |
|
| [51] |
|
| [52] |
|
| [53] |
|
| [54] |
|
| [55] |
|
| [56] |
|
| [57] |
|
| [58] |
|
| [59] |
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}