
Journal of Geographical Sciences >
Using LiDAR-DEM based rapid flood inundation modelling framework to map floodplain inundation extent and depth
|
Zhang Yongqiang, PhD, E-mail: zhangyq@igsnrr.ac.cn |
Received date: 2020-03-10
Accepted date: 2020-07-10
Online published: 2020-10-27
Supported by
CAS Talents Program and IGSNRR Supporting Fund, No(YJRCPT2019-101)
Copyright
Mapping floods is important for policy makers to make timely decisions in regards to emergency responses and future planning. It is therefore crucial to develop a rapid inundation modelling framework to map flood inundation. This study develops an airborne scanning laser altimetry (LiDAR) digital elevation model (DEM) based Rapid flood Inundation Modelling framework (LiDAR-RIM) for assessment of inundation extent, depth, volume and duration for flood events. The modelling framework has been applied to the mid-Murrumbidgee region in the southeast Murray-Darling Basin, Australia for two flood events occurred in December 2010 and March 2012. The inundation extents estimated using this methodology compared well to those obtained from two Landsat ETM+ images, demonstrating suitability and applicability of this method. For testing possibility of larger area application, the framework also uses 30-m resolution shuttle radar topography mission (SRTM)-DEM to replace LiDAR-DEM for the same modelling. The inundation extents obtained by using the SRTM-DEM are smaller than those obtained using the LiDAR-DEM, especially for large flood events. A possible reason is that the river cross sections obtained from the SRTM-DEM are not accurate enough for inundation modelling. The LiDAR-RIM has an advantage for process modelling and scenario modelling under future climatic conditions.
Key words: inundation modelling; DEM; LiDAR; floodplain; hydraulic; remote sensing
ZHANG Yongqiang . Using LiDAR-DEM based rapid flood inundation modelling framework to map floodplain inundation extent and depth[J]. Journal of Geographical Sciences, 2020 , 30(10) : 1649 -1663 . DOI: 10.1007/s11442-020-1805-9
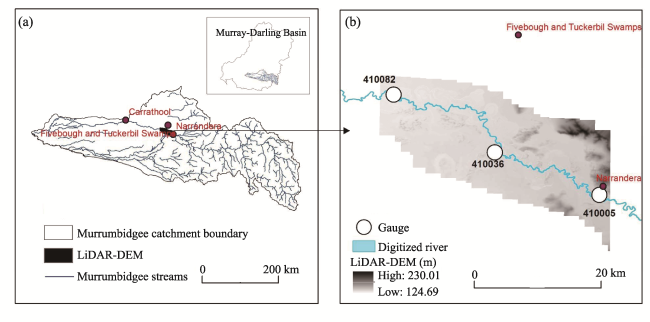
Figure 1 Location of research area (a); spatial pattern of 2-m resolution LiDAR-DEM and locations of the three gauges (b) |
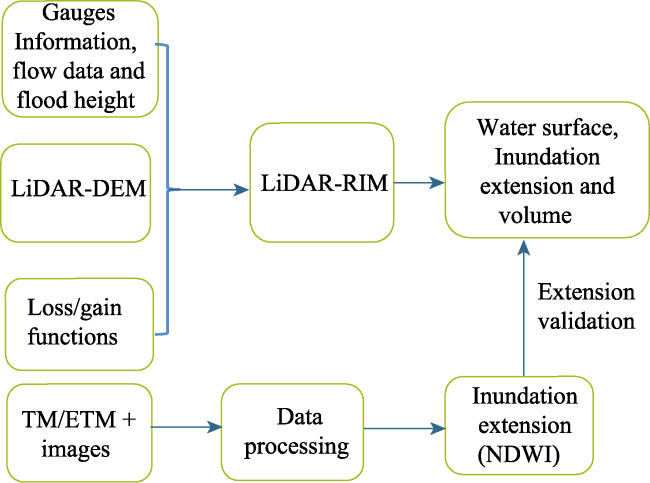
Figure 2 Flowchart showing how the LiDAR - RIM framework works |
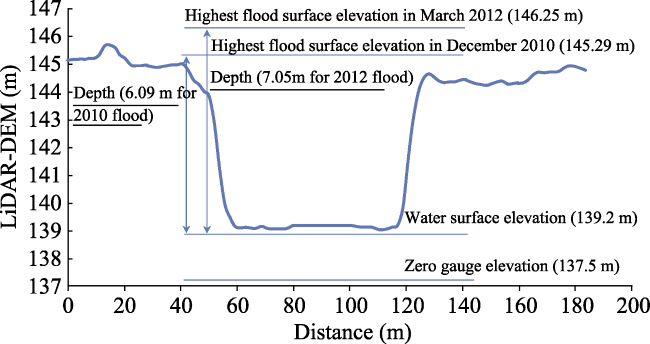
Figure 3 An example for estimating inundation depth from the 2 m LiDAR-DEM water surface to flood water surface at the gauge site 410005 |
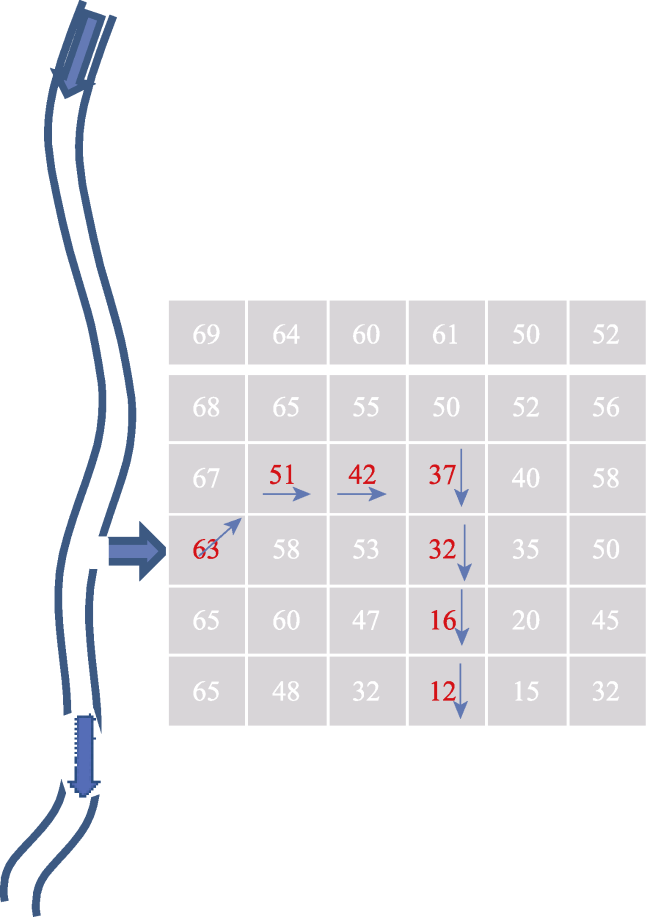
Figure 4 A schematic figure showing flood flow directions over the floodplain |
Table 1 Inundation depth for the three gauging sites and for the two flood events. Maximum inundation depth is the difference between maximum river stage and the depth from zero gauge to the LiDAR-DEM water surface. |
| Gauging site or digitized reach | Depth from zero gauge to LiDAR- DEM (m) | Maximum river stage (m) | Maximum inundation depth (m) | |||
|---|---|---|---|---|---|---|
| December 2010 flood | March 2012 flood | December 2010 flood | March 2012 flood | |||
| Gauging site | 410005 | 1.9 | 7.99 | 8.95 | 6.09 | 7.05 |
| 410036 | 1.3 | 7.38 | 7.92 | 6.08 | 6.62 | |
| 410082 | 0.9 | 7.17 | 7.54 | 6.27 | 6.64 | |
| Digitized reach | 410005-410036 | - | - | 6.08 | 6.84 | |
| 410036-410082 | - | - | 6.18 | 6.63 | ||
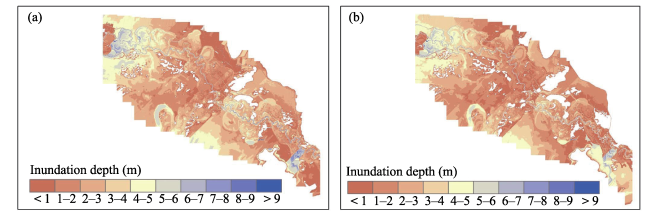
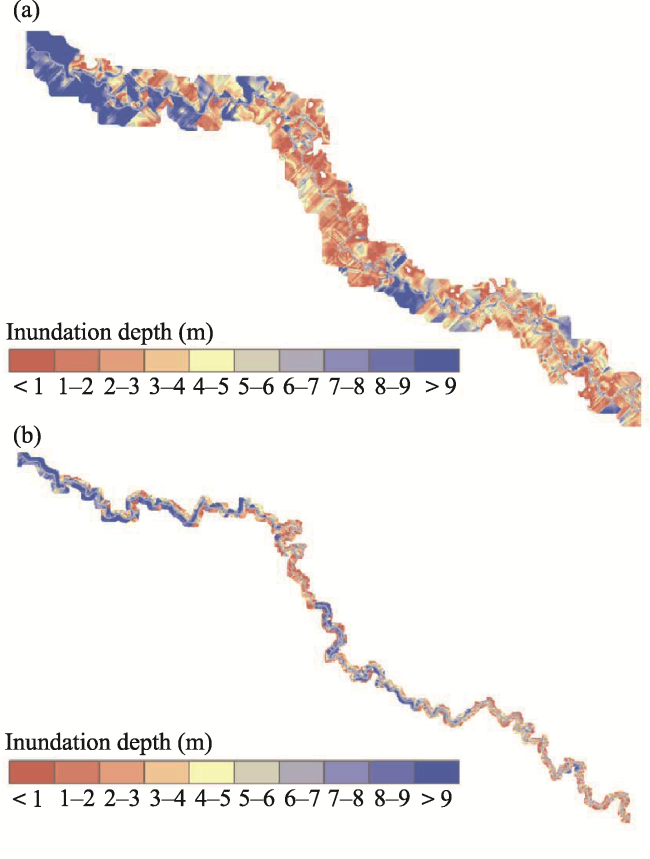
Figure 5 Unconstrained inundation depth mapping for March 2012 flood (a) and December 2010 flood (b) |
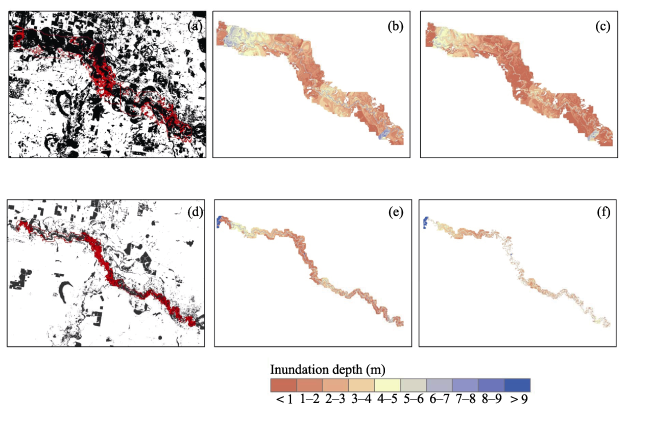
Figure 6 Water bodies (black) extent obtained using Landsat ETM+ images taken on March 20, 2012 (a) and January 5, 2011 (b), respectively (red polygons are the boundaries of actual inundation extent (see Figures 6c and 6f); inundation extents controlled by flood mass balance (b and d); inundation extents obtained by considering flood mass balance control together with infiltration and open water evaporation (c and f). (a)-(c) are for the March 2012 flood; (d) and (f) are for the December 2010 flood. |
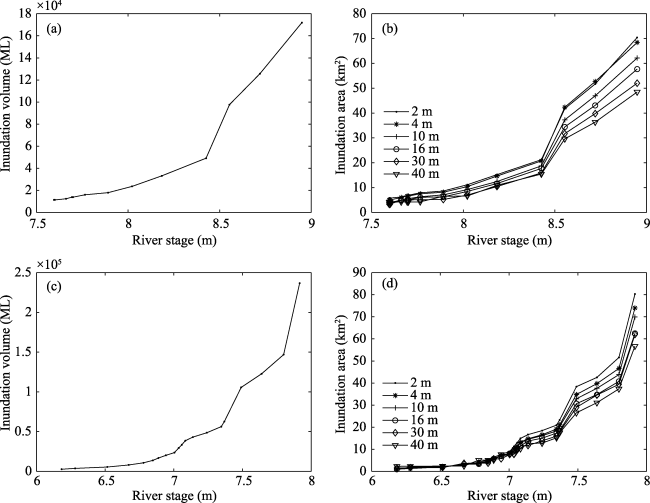
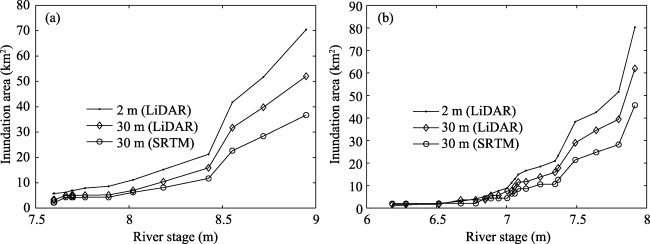
Figure 7 Relationships between the river stage and inundation volume (a and c); relationships between river stage and inundation area obtained using different resolutions from 2 m to 40 m (b and d). The upper panels (a), (b) and (c) are for the March 2012 flood; the lower panels (b), (c) and (d) are for the December 2010 flood. |
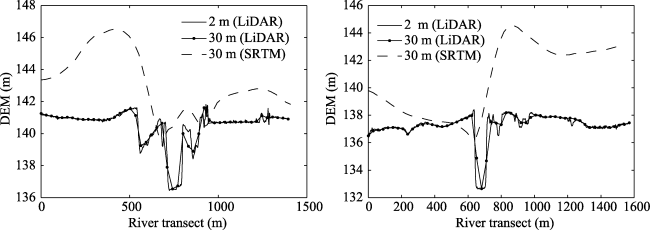
Figure 8 Two cross-sections obtained along the Murrumbidgee River using 2-m and 30-m LiDAR-DEM and 30-m SRTM-DEM |
Figure 9 Inundation extents obtained using SRTM-DEM considering flood mass balance control for the March 2012 flood event (a) and the December 2010 flood events (b) |
Figure 10 Relationships between the river stage and inundation volume for reach 410005 to 410036 (a) and the reach 410036 to 410082 (b) |
| 1 |
|
| 2 |
|
| 3 |
|
| 4 |
|
| 5 |
|
| 6 |
|
| 7 |
|
| 8 |
Dutta, D,
|
| 9 |
EA, 2001. A Directory of Important Wetlands in Australia. 3rd ed. Environment Australia, Canberra. Commonwealth of Australia, 137pp.
|
| 10 |
|
| 11 |
|
| 12 |
|
| 13 |
|
| 14 |
|
| 15 |
|
| 16 |
|
| 17 |
|
| 18 |
|
| 19 |
|
| 20 |
|
| 21 |
|
| 22 |
|
| 23 |
|
| 24 |
|
| 25 |
|
| 26 |
|
| 27 |
|
| 28 |
|
| 29 |
|
| 30 |
|
| 31 |
|
| 32 |
|
| 33 |
|
| 34 |
|
| 35 |
|
| 36 |
|
| 37 |
|
| 38 |
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}