
Journal of Geographical Sciences >
Iterative construction of low-altitude UAV air route network in urban areas: Case planning and assessment
|
Xu Chenchen, PhD Candidate, E-mail: xucc.14s@igsnrr.ac.cn |
Received date: 2020-03-04
Accepted date: 2020-06-02
Online published: 2020-11-25
Supported by
National Key Research and Development Program of China(2017YFB0503005)
Key Research Program of the Chinese Academy of Sciences(ZDRW-KT-2020-2)
National Natural Science Foundation of China(41971359)
National Natural Science Foundation of China(41771388)
Tianjin Intelligent Manufacturing Project: Technology of Intelligent Networking by Autonomous Control UAVs for Observation and Application(Tianjin-IMP-2)
Copyright
With the rapid increase of Unmanned Aircraft Vehicle (UAV) numbers, the contradiction between extensive flight demands and limited low-altitude airspace resources has become increasingly prominent. To ensure the safety and efficiency of low-altitude UAV operations, the low-altitude UAV public air route creatively proposed by the Chinese Academy of Sciences (CAS) and supported by the Civil Aviation Administration of China (CAAC) has been gradually recognized. However, present planning research on UAV low-altitude air route is not enough to explore how to use the ground transportation infrastructure, how to closely combine the surface pattern characteristics, and how to form the mechanism of “network”. Based on the solution proposed in the early stage and related researches, this paper further deepens the exploration of the low-altitude public air route network and the implementation of key technologies and steps with an actual case study in Tianjin, China. Firstly, a path-planning environment consisting of favorable spaces, obstacle spaces, and mobile communication spaces for UAV flights was pre-constructed. Subsequently, air routes were planned by using the conflict detection and path re-planning algorithm. Our study also assessed the network by computing the population exposure risk index (PERI) and found that the index value was greatly reduced after the construction of the network, indicating that the network can effectively reduce the operational risk. In this study, a low-altitude UAV air route network in an actual region was constructed using multidisciplinary approaches such as remote sensing, geographic information, aviation, and transportation; it indirectly verified the rationality of the outcomes. This can provide practical solutions to low-altitude traffic problems in urban areas.
XU Chenchen , LIAO Xiaohan , YE Huping , YUE Huanyin . Iterative construction of low-altitude UAV air route network in urban areas: Case planning and assessment[J]. Journal of Geographical Sciences, 2020 , 30(9) : 1534 -1552 . DOI: 10.1007/s11442-020-1798-4
Table 1 The minimum general element set for the iterative construction process of regional air route network |
| Step | Key technology | Required elements | Optional elements | Required data processing |
|---|---|---|---|---|
| I | Hierarchi- cal planning | Road network: urban expressway, urban main road, community or campus internal trunk road Mobile base station. | Roads around buildings within a community or campus. | Road network: extract the road area and its center line and measure the road width. The road is stored in the form of shapefile. A road is a record composed of the coordinate values of feature points. Mobile base station: analyze the communication coverage limit and determine the regional route height limit accordingly. |
| II | Utilizing positive constraints | None. The positive constraint element is only auxiliary but not required. | Urban green belt, isolation belt, grassland, street trees, parks, and other green areas; rivers, large areas of waters, ditches, and other water sources. | Green space: the relative position with the road determines the translation direction and translation distance, and thus the direction and translation distance matrices. Water area: the relative position with the road determines the translation direction and translation distance, and thus the direction and translation distance matrices. |
| III | Avoiding negative constraints | General obstacles: buildings, mobile base station tower poles, street lamps, power lines (poles), etc. | Other obstacles, such as terrain in constructing the route in mountainous areas. | Mobile base station: the clearance boundary modeling of the tower pole is used to build an “obstacle” environment, and the communication coverage is modeled to analyze the spatial signal distribution. Other ground objects: to construct a mathematical model of clearance boundary. |
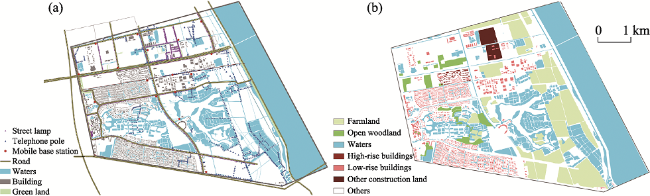
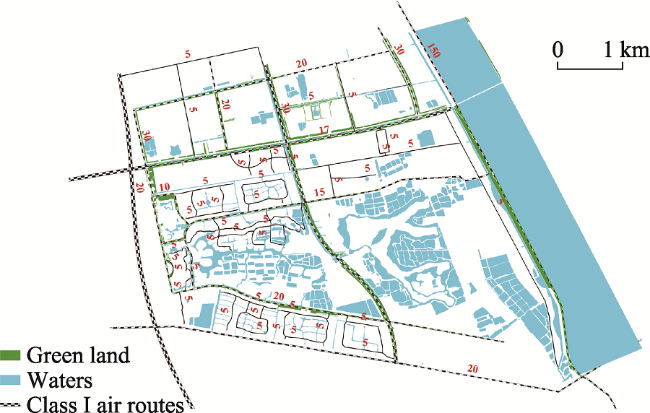
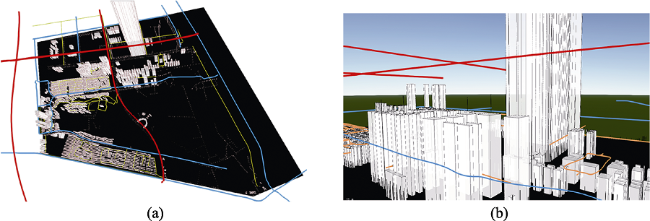
Figure 1 Ground objects distribution (a) and land use classification (b) in JJXC district |
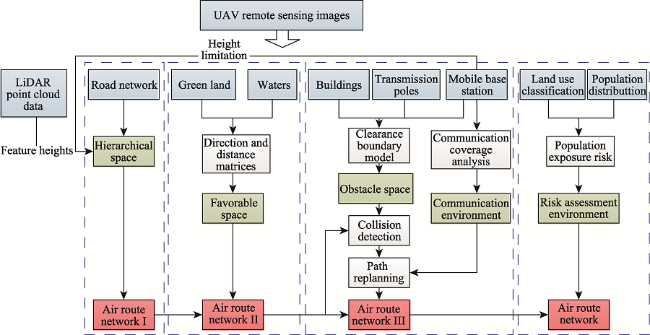
Figure 2 Roadmap of iteratively constructing the multi-level air route network in urban areas |
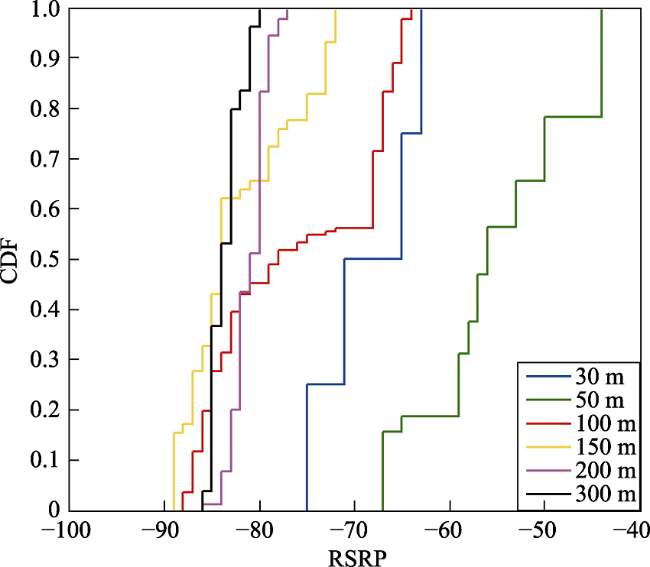
Figure 3 The Cumulative Distribution Function (CDF) for RSRP index of the single base station |
Figure 4 Schematic diagram of single base station signal modeling at 120-m height |
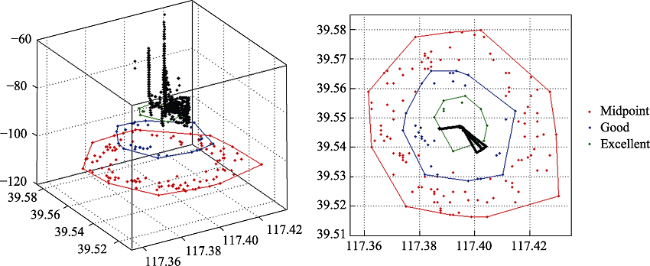
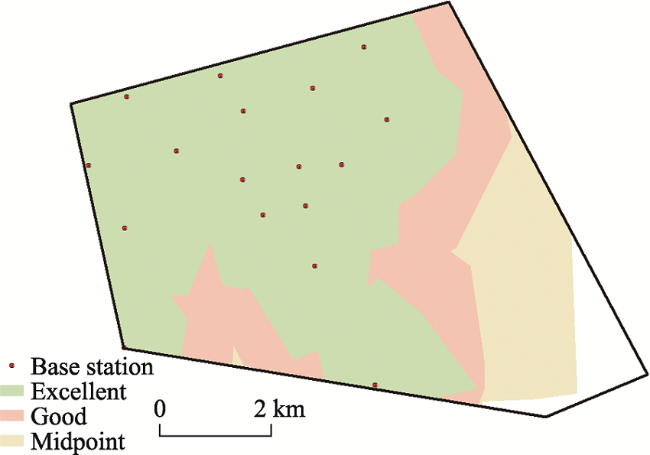
Figure 5 Schematic diagram of regional signal distribution of base stations at 120-m height |
Table 2 Air route classification and relative attributes in JJXC district (Xu et al., 2020) |
| Types | Function | Constraints | Height (m) | Minimum height (m) | Platform |
|---|---|---|---|---|---|
| 1 | Connecting urban areas with the outside area | Higher than most of ground objects in urban area | 70-300 | 70 | Fixed wing/multi- rotor UAV |
| 2 | Main traffic routes inside the urban areas | Higher than lamps, trees, and buildings along roads | 50-70 | 50 | Multi-rotor UAV |
| 3 | Internal air route of community units in urban area | None | 15-50 | 30 | Multi-rotor UAV |
Figure 6 Moving distances for each class I air route obtained from actual investigations |
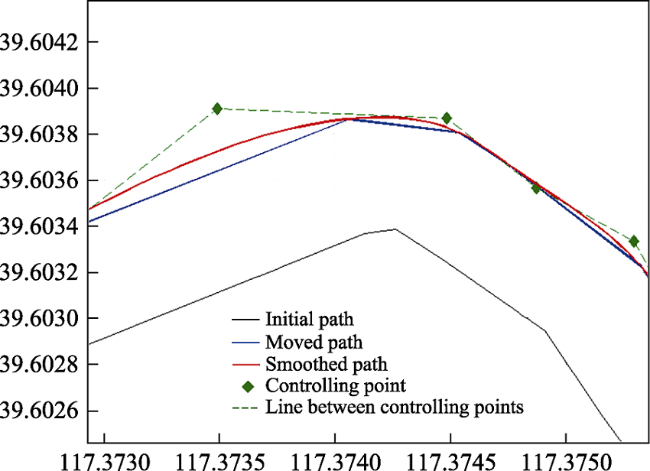
Figure 7 Diagram of comparison among the initial path, moved path and smoothed path |
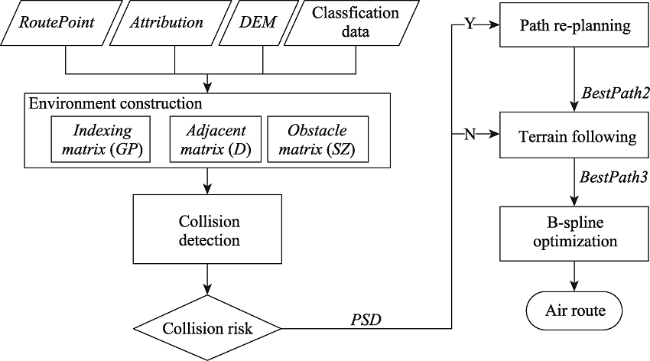
Figure 8 Flowchart of the main process of constructing the class III air route network (DEM: Digital Elevation Model) |
Figure 9 Low-altitude UAV air route network and its local enlarged map in the JJXC district (Red lines: type 1 air routes; blue lines: type 2 air routes; yellow lines: type 3 air routes) |
Table 3 Sheltering factor for each type of land use |
| Code | Type | Sheltering factor |
|---|---|---|
| 12 | Farmland | 0 |
| 23 | Open woodland (canopy density 10%-30%) | 2.5 |
| 41 | Waters | 0 |
| 51 | High-rise buildings | 7.5 |
| 52 | Low-rise buildings | 5 |
| 53 | Other construction land: factories and mines, large industrial zones, oil fields, salt fields, quarries and other patches of land; traffic roads, airports, and special areas | 10 |
| 61 | Others, including of unexploited land (e.g., deserts, salt flats, marshes) | 0 |
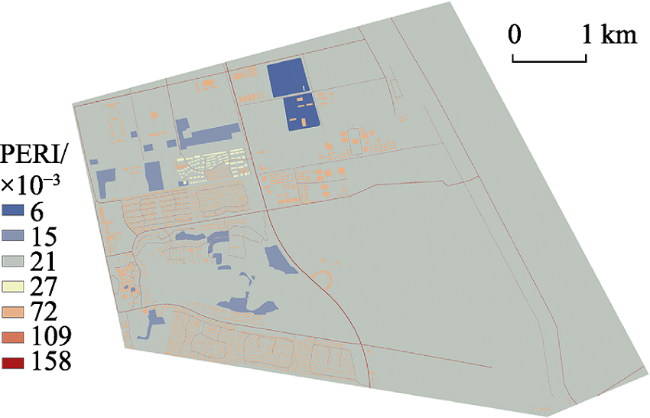
Figure 10 Population exposure risk distribution of UAV operation in the study area |
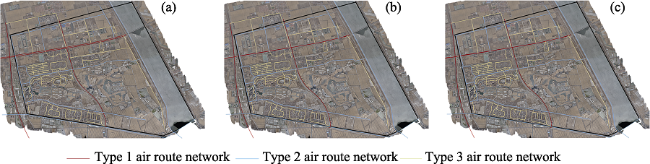
Figure 11 Maps showing each iterative air route network (a. class I air route network; b. class II air route network; c. class III air route network) |
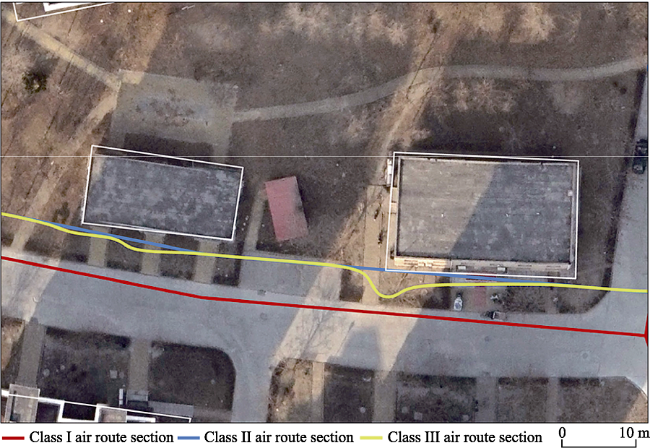
Figure 12 Enlarged local map for class I-III air routes |
Table 4 Comparison of the population exposure risk for iterative UAV low-altitude air route network |
| Type | Population exposure risk index (PERI) | |||||
|---|---|---|---|---|---|---|
| Average | Variance | Average | Variance | Average | Variance | |
| Type 1 | Type 2 | Type 3 | ||||
| Class I | 62.42 | 62.92 | 158 | 0 | 117.47 | 62.14 |
| Class II | 21.75 | 9.05 | 25.98 | 15.35 | 23.92 | 17.88 |
| Class III | 21.74 | 8.89 | 25.06 | 14.05 | 25.37 | 22.17 |
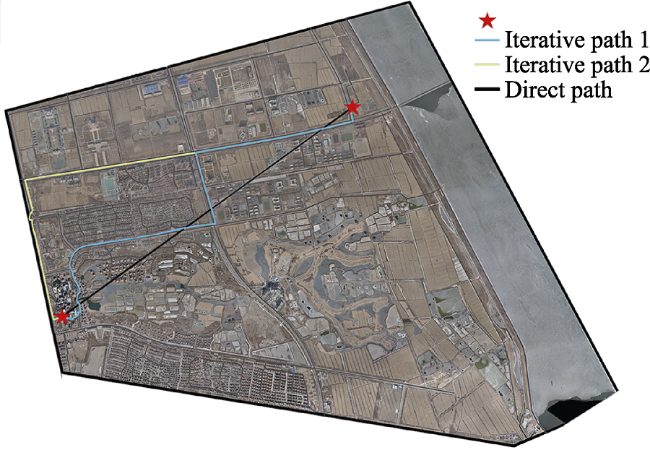
Figure 13 Direct and iterative paths for population risk comparison |
Figure 14 Air route network construction process (a. class I air route based on roads; b. class II air route based on favorable space; c. class III air route based on obstacle space; red line: re-planned air route segments) |
| [1] |
3GPP, 2017. Study on enhanced LTE support for aerial vehicles (Release 15). https://www.3gpp.org/ftp/Specs/archive/36_series/36.777/.
|
| [2] |
Air Traffic Management Research Institute (ATMRI), 2017. Framework for urban Traffic Management of Unmanned Aircraft Systems (uTM-UAS). DRONE ENABLE, ICAO Unmanned Aircraft Systems (UAS) Industry Symposium. Montreal, Canada.
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
Bietlot, 2017. U-Space Blueprint. SESAR, Belgium, 978-92-9216-086-9. https://www.sesarju.eu/u-space-blueprint.
|
| [9] |
|
| [10] |
CAAC, 2009. Reference for route network planning methods. IB-TM-2009-009. (in Chinese)
|
| [11] |
CAAC, 2018. Test report of safe flights in low altitude for networked UAVs. http://www.caac.gov.cn/XXGK/XXGK/GFXWJ/201811/t20181127_193186.html.(in Chinese)
|
| [12] |
CAAC, 2019. Guidelines on promoting the development of civil unmanned aviation (draft for comments). http://www.caac.gov.cn/HDJL/YJZJ/201905/t20190514_196175.html.(in Chinese)
|
| [13] |
|
| [14] |
China Mobile, 2012. Acceptance specification on wireless engineering acceptance for TD-LTE system (1.0.0). QC-G-001-2012. (in Chinese)
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
|
| [30] |
|
| [31] |
|
| [32] |
|
| [33] |
The Government of Tianjin, 2009. Technical regulations on urban planning and management in Tianjin, China. (in Chinese)
|
| [34] |
|
| [35] |
|
| [36] |
|
| [37] |
|
| [38] |
|
| [39] |
|
| [40] |
|
/
| 〈 |
|
〉 |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}