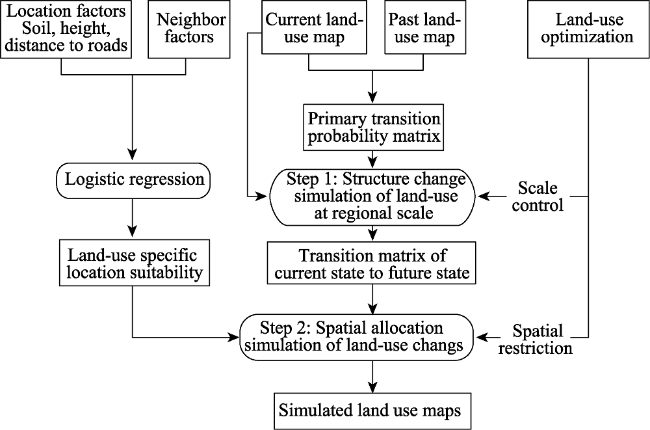
There are two steps in simulating land-use change under different land-use optimization policies. The first step is to simulate the structure changes of land-use types at the regional scale. The second step is to simulate the spatial distribution change at the grid scale (
Figure 2). In the first step, both the historical transition probability matrix and the scale control rules are developed to design the future transition matrix. In the second step, the future transition matrix of land-use change is spatially distributed based on the location suitability of land-use types and the spatial restriction rules.
Figure 2 Model framework of land-use change simulation |
3.1.2 Structure change simulation of land use at the regional scale
In this model, we assume that the uncontrolled land-use change is submitted to a Markov process (
Weng, 2002) and the transition probability matrix is stable in different time states (
Alqurashi et al., 2016). The future transition between land-use types can be simulated based on the historical transition probability matrix, which are described in Eqs.1 and 2.
${{p}_{h}}=\prod\limits_{t=1}^{m-1}{\left( \overline{{{p}_{h}}}\times \overline{{{p}_{h}}} \right)}$ (1)
${{p}_{f}}=\prod\limits_{t=1}^{n-1}{\left( \overline{{{p}_{h}}}\times \overline{{{p}_{h}}} \right)}$ (2)
where ph, $\overline{{{p}_{h}}}$ and pf refer to the historical transition probability matrix, the annual transition probability matrix from past state to current state and the transition probability matrix from current state to future state, respectively. m and n refer to the time step (year) from past state to current state, and current state to future state, respectively.
Since the annual transition probability matrix cannot be directly acquired from the matrix multiplication, a gradient descent approach is employed to obtain the annual transition probability matrix (
Yao et al., 2016). The transitions between land-use types from the current state to future state and the land-use areas in the future state can be simulated with Eqs.3 and 4.
${{A}_{ij,f}}={{A}_{i,c}}\times {{p}_{ij,f}}$ (3)
${{A}_{j,f}}={{\Sigma }_{i}}{{A}_{ij,f}}$ (4)
where pij,f and Aij,f refer to the transition probability and transition area from land-use i to j from current state to future state, respectively. Ai, c and Aj, f refer to the area of land-use i in current state and the area of land-use j in future state, respectively.
The scale control policy is a common strategy of land-use optimization. Since the land-use change is a flexible, stable and self-organized process (
Verburg et al., 2002), we assumed that the uncontrolled transition matrix reflecting the historical knowledge of land-use changes, would self-adjust to meet the land-use demand of scale control policies with minimum cost (
Duan et al., 2006). In this article, the cost is measured by the cross-entropy from the uncontrolled transition matrix to the controlled matrix. The object to derive the controlled matrix with scale control policies is to minimize the value of the cross-entropy cost (Eq.5).
$Min\ H=Min\left[ \sum\limits_{i=1}^{n}{\sum\limits_{j=1}^{n}{{{p}_{ij,f}}\times \ln \left( \frac{{{p}_{ij,f}}}{p_{ij,f}^{*}} \right)}} \right]$ (5)
where pij, f and $p_{ij,f}^{*}$ refer to the transition probabilities from land-use type of i to j in the controlled and uncontrolled matrixes, respectively. n refers to the number of land-use types.
The constraint conditions can be described by Eqs.6 and 7.
$\sum\limits_{j=1}^{n}{p_{ij,f}^{*}=1}$ (6)
$\sum\limits_{i=1}^{n}{\left( p_{ij,f}^{*}\times {{A}_{i,c}} \right)}={{D}_{j}}$ (7)
where Dj represents the scale control value of land-use type j.
The constraint optimization problem can be translated into a non-constraint optimization problem with the Lagrangian multiplier method (
Bertsekas, 2014), and the translated project function can be described by Eq.8.
$\text{Min}\ {{H}^{*}}=\text{Min}\left\{ {{\Sigma }_{i}}{{\Sigma }_{j}}{{p}_{ij,f}}\times \ln \left( \frac{{{p}_{ij,f}}}{p_{ij,f}^{*}} \right)+{{\Sigma }_{i}}{{\alpha }_{i}}\times \left( {{\Sigma }_{j}}p_{ij,f}^{*}-1 \right)+{{\beta }_{j}}*\left[ {{\Sigma }_{i}}\left( p_{ij,f}^{*}*{{A}_{i,c}} \right)-{{D}_{j}} \right] \right\}$ (8)
The function can be solved with the first optimal conditions, which can be described by Eqs.9-11.
$\frac{\partial {{H}^{*}}}{\partial p_{ij,f}^{*}}=-\frac{{{p}_{ij,f}}}{p_{ij,f}^{*}}+{{\alpha }_{i}}+{{\beta }_{j}}\times {{A}_{i,c}}=0$ (9)
${{\Sigma }_{j}}p_{ij,f}^{*}=1$ (10)
${{\Sigma }_{i}}\left( p_{ij,f}^{*}\times {{A}_{i,c}} \right)={{D}_{j}}$ (11)
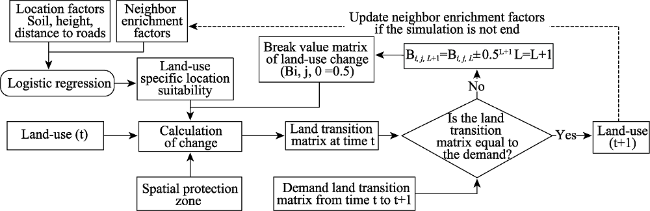
3.1.3 Spatial allocation simulation
On the basis of land transition matrix simulated at the region scale, the spatial allocation module is employed to simulate the spatial allocation change at the grid scale. In this module, the land-use specific location suitability of different land-use types and the spatial protection planning strategies were considered to derive the spatial allocation change (
Figure 3).
Figure 3 Spatial allocation module of land-use change simulation |
The land-use specific location suitability from current land-use type
i to the target land-use type
j at the specific location
loc is determined by the location factors, i.e. soil texture, height, distance, etc., and the neighbor enrichment factors (
Verburg et al., 2004) (Eqs.12 and 13).
${{S}_{j,(loc,i)}}=\frac{1}{1+{{e}^{\left( {{L}_{X,(loc,i)}}*{{W}_{L,X,j}}+{{N}_{X,(loc,i)}}*{{W}_{N,X,j}}+a \right)}}}$ (12)
${{N}_{x,(loc,i)}}=\frac{{{n}_{x,(loc,i)}}/{{n}_{(loc,i)}}}{{{N}_{x}}/N}$ (13)
where Sj,(loc,i) represents the logistics probability of the specific location loc changing from land-use type i to j, LX,(loc, i) represents the value vector of local driving factors such as slope, height, distance to main roads, etc., WL,X,j represents the weight vector corresponding to the value vector of local driving factors, NX,(loc,i) represents the value vector of neighbor enrichment factors, and WN,X,j represents the weight vector of the neighbor enrichment vector. a represents the intercept value of the regression model. Nx,(loc,i) and nx,(loc,i) represent neighbor enrichment value of land-use type x and the number of grids with land-use type x in the neighborhood of land grid loc with land-use type of i, respectively; n(loc,i) represents the total amount of grids for all land-use types in the neighborhood of the land grid, Nx represents the amount of grids of land-use type x in the study area, and N represents the total amount of grids in the study area.
The transition probability from current land-use type i to the target land-use type j at the specific location loc (Pj, (loc, i)) is determined by both the suitability and the spatial restriction rules (Eq.14).
${{P}_{j,(loc,\ i)}}={{\left[ {{S}_{j,\ (loc,\ i)}}\times pr{{t}^{\left| sgn(i-j) \right|}} \right]}^{pr{{t}^{1-\left| sgn(i-j) \right|}}}}$ (14)
where prt is equal to 0 when the specific location falls in the spatial protection zone, prt is equal to 1 when the specific location does not fall in the spatial protection zone. sgn refers to the sign function. |sgn(i-j)| equals 0 when i is equal to j, and equals 1 when i is not equal to j.
Whether the specific location loc will change from current land-use type i to j is determined by whether the transition probability value at this location is greater than the break value (Eq.15). The original break value for all transition probabilities was set as 0.5. The aggregate number of change areas will be calculated for every iteration and the break value will be modified in the next iteration until the aggregate results of land-use changes at the grid scale meet the demand of transition matrix at the region scale (Eq.15).
${{B}_{i,j,L+1}}={{B}_{i,j,L}}+{{0.5}^{L+1}}*\frac{\left| {{\Sigma }_{loc,i}}({{P}_{j,(loc,i)}}>{{B}_{i,j,t}})-{{T}_{i,j}}+0.0001 \right|}{{{\Sigma }_{loc,i}}({{P}_{j,(loc,i)}}>{{B}_{i,j,t}})-{{T}_{i,j}}+0.0001}$ (15)
where Bi, j, L represents the break value of land-use transition from i to j at step L. Σloc,i (Pj,(loc,i) >Bi, j, t) represents the amount of grids of land-use type i and the transition probability to j is greater than the break value. Ti, j represents the demand transition number of grid from i to j which is determined by the structure change simulation module at the regional scale.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}